







バージョンアップのお知らせ(AJ1.4.1.2)
2025年8月5日
お知らせ
K-D2 PLANNER®ユーザーの皆様
平素よりK-D2 PLANNER®をご愛顧いただき、誠にありがとうございます。
AJ1.4.1.2へのバージョンアップを実施いたしました。
ご購入済みのお客様はこちらのユーザーサイト※1よりダウンロードをお願いいたします。
バージョン(AJ1.4.1.2)での新機能・改善一覧
【主な新機能追加】(以下に詳細説明がございます)
- 運搬経路を自動で生成する機能を追加
- 吊り位置を任意指定できる機能を追加
【主な改善点】
- Revit® 2025への対応
新機能を動画で見る
【運搬経路を自動で生成】
玉掛け姿勢と玉外し姿勢を登録するだけで途中の運搬経路を自動生成いたします。
運搬経路を自動で生成する機能について
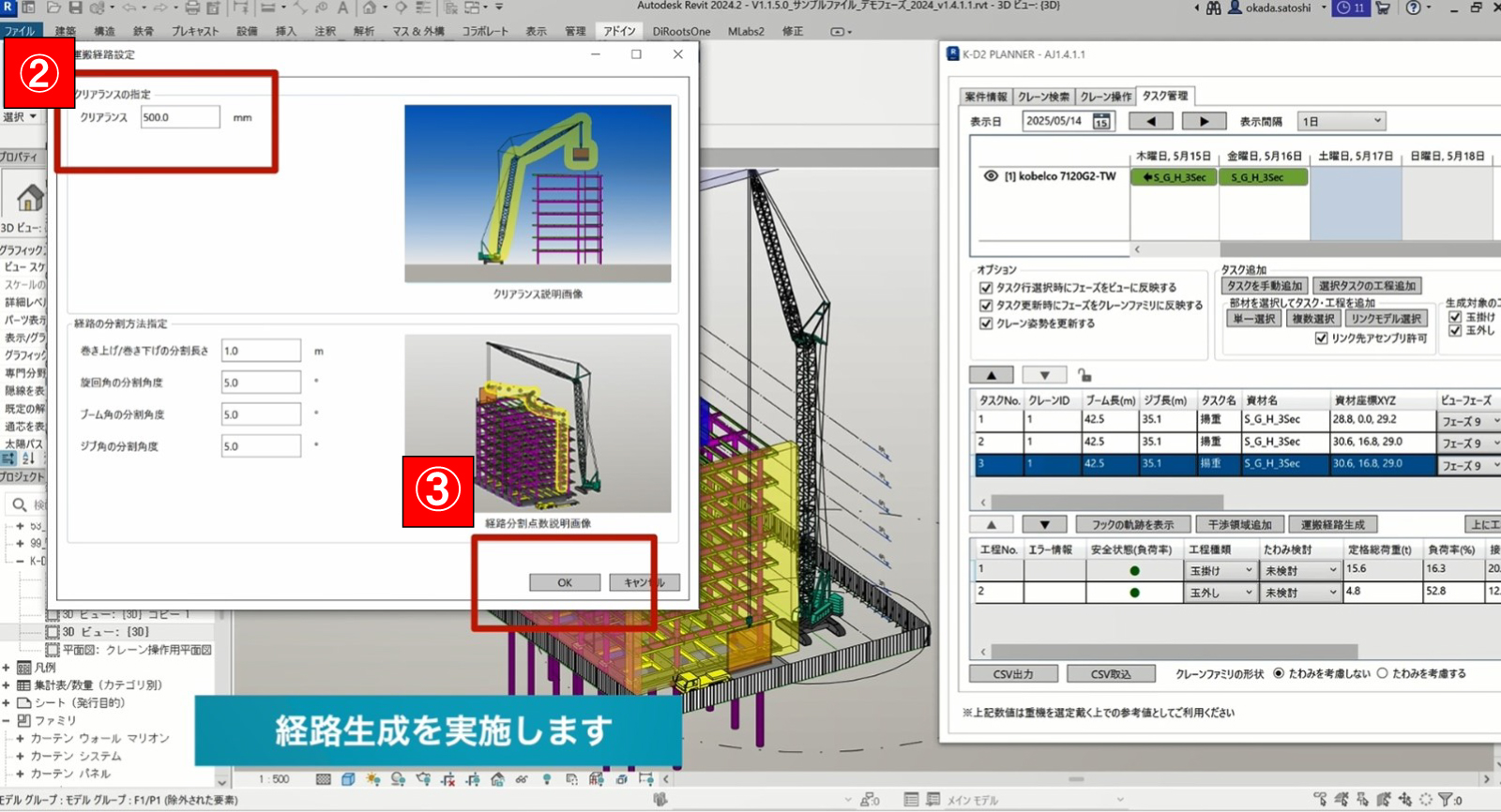
クレーンの玉掛け姿勢(スタート)・玉外し姿勢(ゴール)を登録するだけで、途中の運搬経路を自動で生成いたします。
また、事前に建物付近の障害物を配置(干渉領域の設定)いただくことで、障害物との干渉を避けた運搬の経路※2も作成することができます。
※2 本システムでは、干渉領域の設定がなくても運搬経路を自動で生成する機能をご利用いただけます。
本機能追加対応に加え、下記機能を強化いたしました。
- Navisworks®とフェーズビューへの出力機能
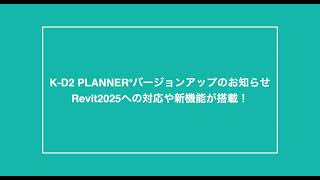
操作手順
- 干渉領域(干渉を回避する範囲)の設定
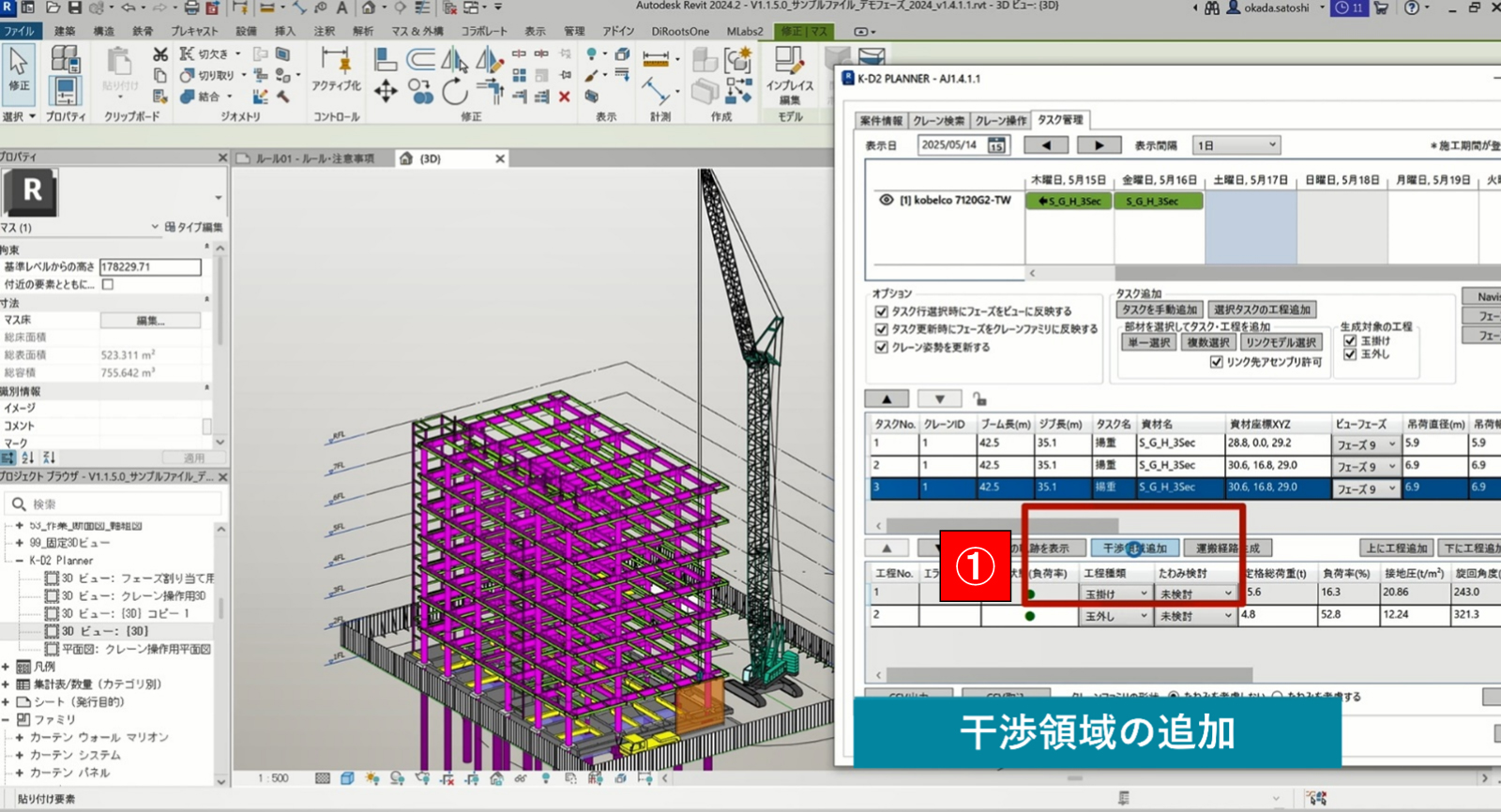
- 干渉領域とのクリアランス(離隔距離)とフック軌跡の分割設定
- 運搬経路生成の出力完了
下記サンプル画像では足場や屋上の既設物を表現した干渉領域を設定しています。
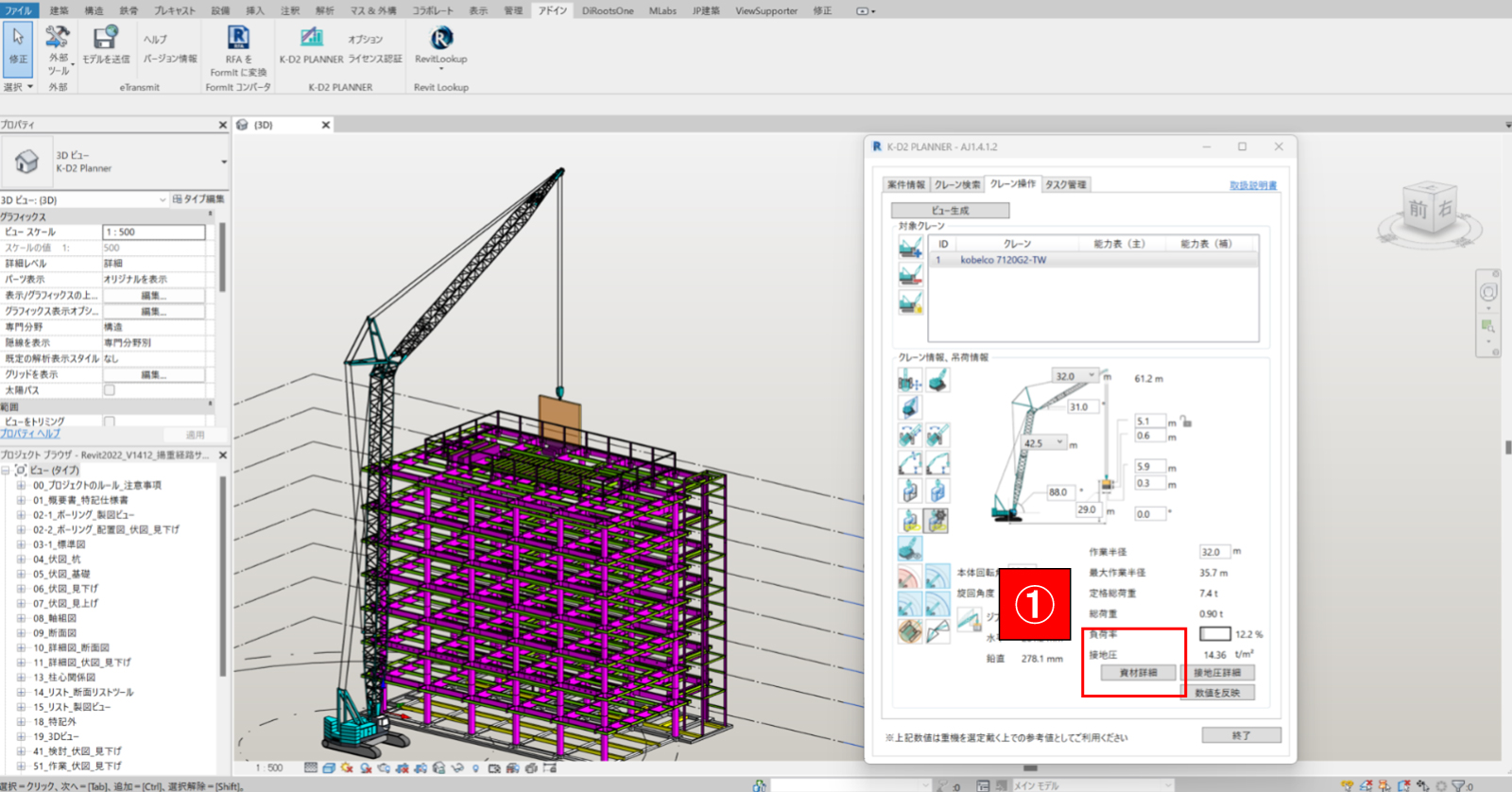
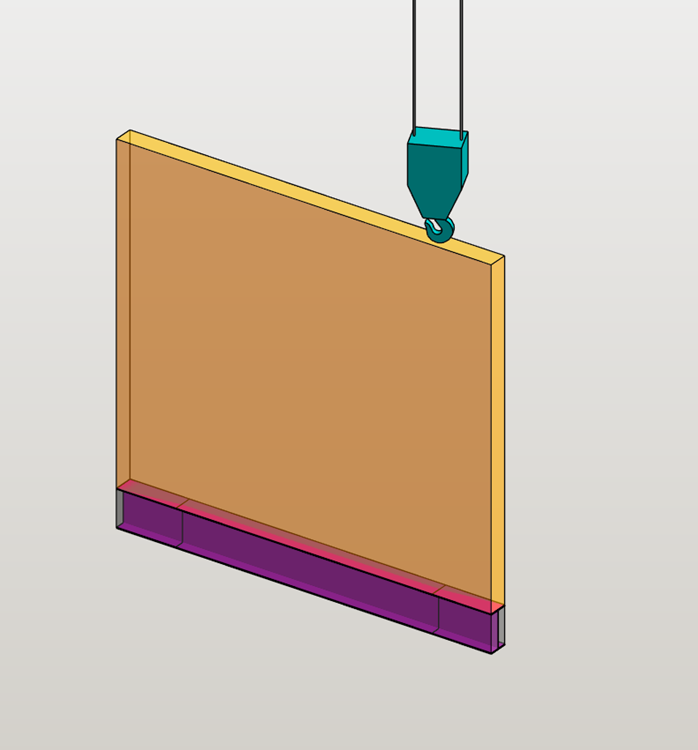
吊り位置の任意指定ができる機能について
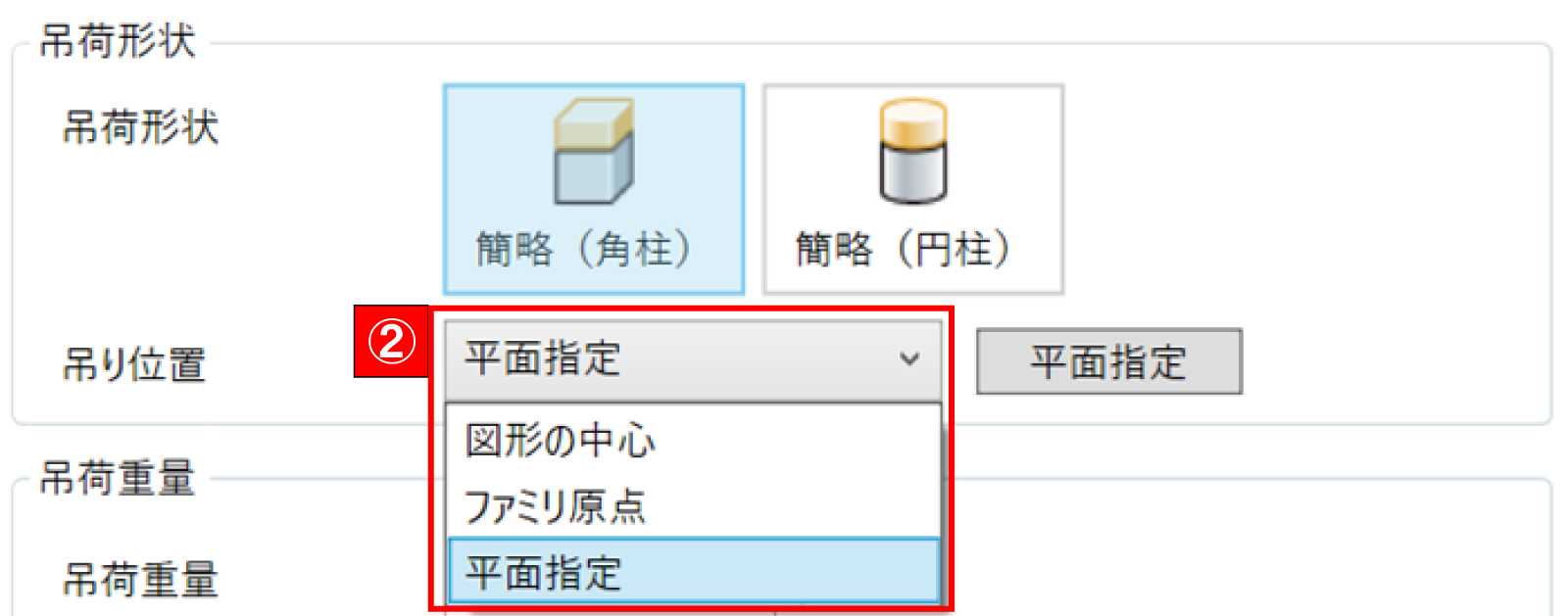
吊り荷を選択した際に、フックの位置を自動的に吊り荷形状の中心に合わせていた機能に対し、以下3種類の設定に変更することが可能となりました。
- 図形の中心(従来機能)
- ファミリ原点
- 平面指定
平面指定の場合の操作手順
- 資材詳細を選択
- 吊り位置のボタンより平面指定を選択
- 2D上にて吊り位置を指定
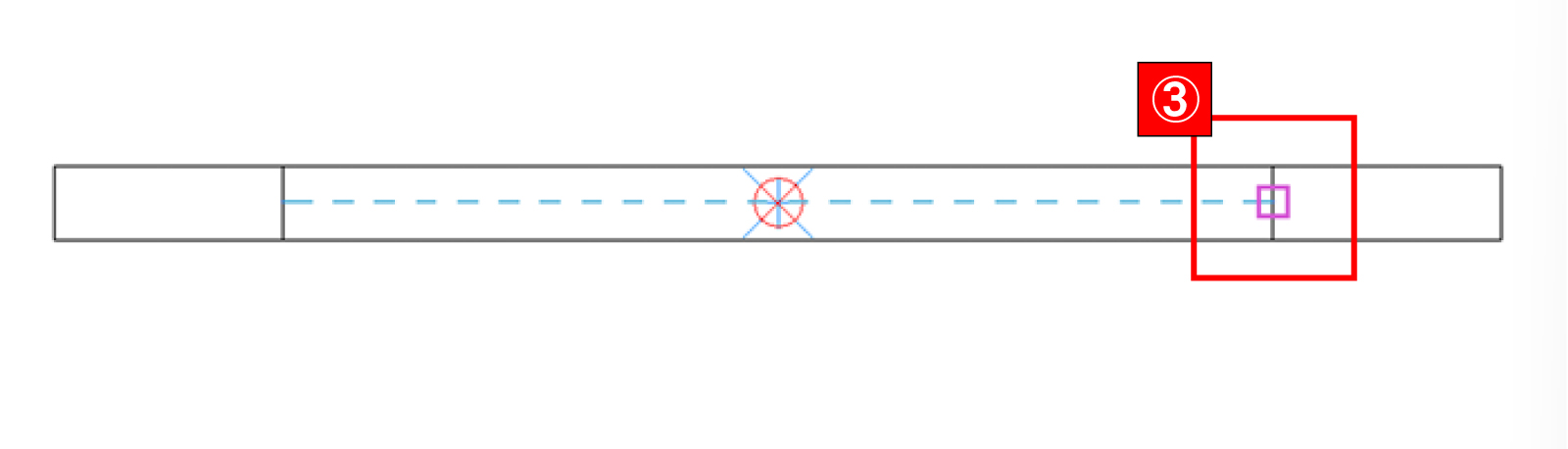
※オレンジの四角は吊り位置の領域を表現しております。
※1 ユーザーサイトはご購入済みのユーザー様のみご利用が可能となります。
ユーザーサイトへのログインはご契約時に発行しておりますEIDが必要となります。
EIDがご不明な方は、ご契約者様にご確認頂くか弊社お問い合わせ窓口までお知らせください。
Revit, NavisworksはAutodesk社の登録商標です。