
特集最良の価値を提供「安全」にかけるコベルコの想い
最良の価値を提供
「安全」にかける
コベルコの想い
ミニショベル向け衝突軽減装置
OmniEye®上市に寄せて
menu
ミニショベル向け衝突軽減装置
OmniEye®上市に寄せて
土木・建設や解体等の現場でも、働き方改革や建設DXが進み、ICT施工なども浸透してきた。
さらに現場の安全性に関しても、これまでのノウハウとデジタル技術を駆使した改革が進められている。
そこで、今回はコベルコ建機のショベルを巡る安全思想と施策の歴史を踏まえながら、
最新の衝突軽減装置OmniEye(オムニアイ)の概要と開発ストーリーを紹介する。
開発、マーケティングに携わったコベルコ建機の平山道夫、酒井 満と
株式会社レグラスの酒井 将さん、小川幸孝さんに
OmniEyeに託された安全にかける想いを語り合ってもらった。
※OmniEye®は株式会社レグラスの登録商標です。

平山道夫
マーケティング事業本部
ショベル営業本部
施工ソリューション部
ソリューション開発グループ
マネージャー

酒井 満
マーケティング事業本部
ショベル営業本部
施工ソリューション部
ソリューション営業グループ
マネージャー

酒井 将さん
株式会社レグラス
代表取締役社長

小川幸孝さん
株式会社レグラス
取締役 IPS事業部長

「人のみ」を見分け、ミニショベル特有の狭所地・近接作業にも強みを発揮するOmniEye。2022年5月に開催された「CSPI-EXPO」でも、デモンストレーションが行われた
搭載イメージ


1単眼カメラ(半天球カメラ)

2警告ランプ(スピーカ内蔵)

3コントロールボックス
4液晶モニタ
1単眼カメラ(半天球カメラ)
ブラケットでボルト固定。装着高さにより検知範囲は伸縮するが、個別の初期設定を不要にするため装着高さはSR/UR機で2,150mm共通を推奨
2警告ランプ(スピーカ内蔵)
ブラケットでボルト固定。注意エリアで人を検知すると黄色ランプが点灯。危険エリアで人を検知すると赤色ランプが点灯し、警報ブザーが鳴る
3コントロールボックス
パネル面に磁石で取り付け可能。機械の始動キーと連動して電源ON。任意設定の危険エリア内に人が入ると警報を発報し、赤色ランプ点灯と同時に機械が停止
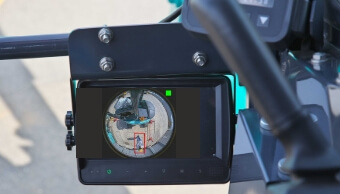
4液晶モニタ
パイプの上と下のどちらにも取り付け可能。カメラ映像を鳥瞰画像化して周囲360度を投影。検知範囲は後方240度程度
3大ポイント
カメラが「人」のみを検知
安全補助と効率性を両立
録画可能・
映像記録機能内蔵
システムはアドオン装着
1台導入すれば
複数台で付け替え可能映像記録機能内蔵

「CSPI-EXPO」に参考出展されたOmniEye 搭載機は、屋内展示でも注目された